Im Tabellenblatt AdsHosts werden die Kommunikations-Parameter für die Kommunikationskanäle zu Beckhoff TwinCAT Steuerungen projektiert.
Beispiel:
#Hostname |
AdsServer-IP |
Delay[ms] |
Timeout[s] |
reserved |
DelayOnError[s] |
reserved |
AdsServer Port |
AmsNetId |
AmsPort |
reserved |
Path symbolfile |
PLC1 |
192.168.0.99 |
Treiber-DLL: drvAds.dll
Kommunikation Beckhoff TwinCAT Steuerungen
Parameter |
M/O |
Default |
Beschreibung |
Hostname |
M |
|
Eindeutiger Name |
AdsServer-IP |
M |
|
IP Adresse des Ads-Server |
Delay[ms] |
O |
200 |
Verzögerung zwischen zwei Lese-Operationen |
Timeout[s] |
O |
3 |
Maximale Zeit, die bei der Kommunikation nicht überschritten werden darf.(Connect, Read, Write) |
reserved |
|
|
|
DelayOnError[s] |
O |
3 |
Verzögerung nach einem Fehler. Verhindert das zB. während einem "Online Change" zu schnell wieder connected wird |
Reserved |
|
|
|
AdsServer Port |
O |
48898 |
TCP-Port des Ads-Server |
AmsNetId |
O |
<AdsServer-IP>.1.1 |
"Ams Net Id" der TwinCAT Wenn keine AmsNetId angegeben wird, wird die Ads-Server-IP verwendet und mit ".1.1" erweitert |
AmsPort |
O |
801 |
|
reserved |
|
|
|
Path symbolfile |
O |
|
Pfad und Name des importierten Symbolfile |
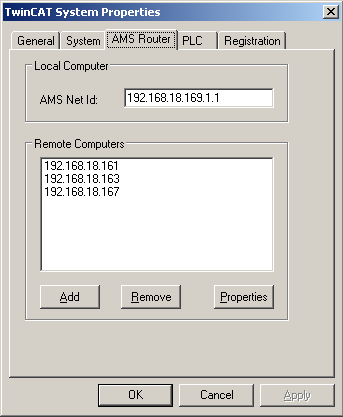
Konfiguration des TwinCAT System
Damit das EPAM4-RTS mit einer TwinCAT Steuerung kommunizieren kann, muss dem "AMS Router" auf dem TwinCAT-System das EPAM4-RTS bekannt gemacht werden.
|
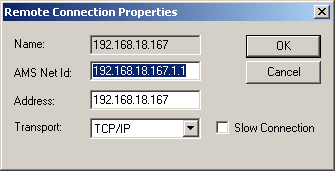
EPAM4 RTS zum AMS Router hinzufügen:
|